
Underwater research may be made easier with the help of a robot fish outfitted with a twisted and coiled polymer (TCP), a lightweight, inexpensive technology that depends on temperature change to produce movement. When heated, TCP contracts like a muscle, transforming the energy into mechanical motion. The TCP utilised in this study is warmed by a process known as Joule heating, which involves running an electrical current through a conductor to create thermal heat and energy to heat it up.
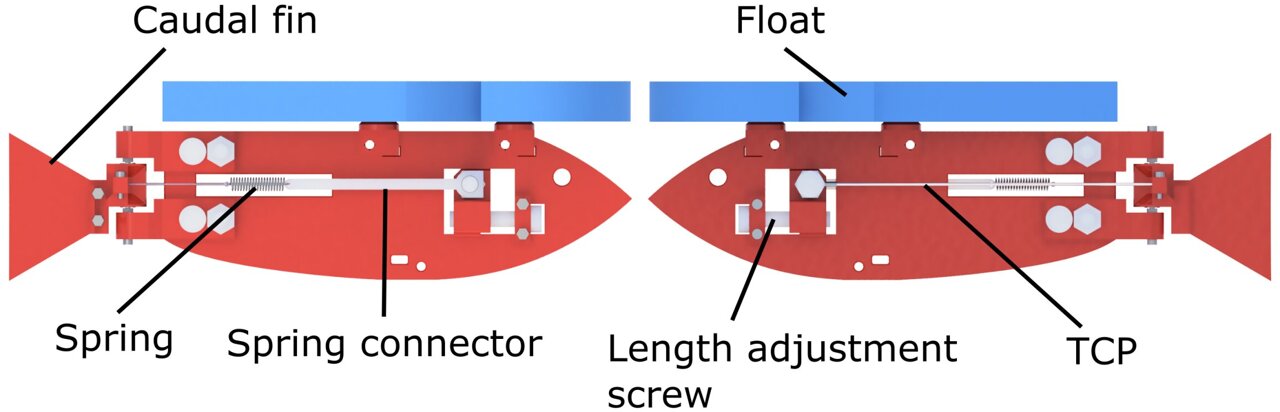
The robot fish may accelerate to new speeds by reducing the distance between the TCP on a single side and the spring on the other of the robot fish. Two waves per second, or 2Hz, were used to measure the back fin’s oscillating flapping motion. The frequency of the electric current and the frequency of the tail flap are identical. The results offer a new way to increase the actuation frequency of TCPs by thermomechanical design and demonstrate the viability of employing TCPs at high frequencies in aqueous settings. They were presented at the 6th IEEE-RAS International Conference in Soft Robotics (RoboSoft 2023).
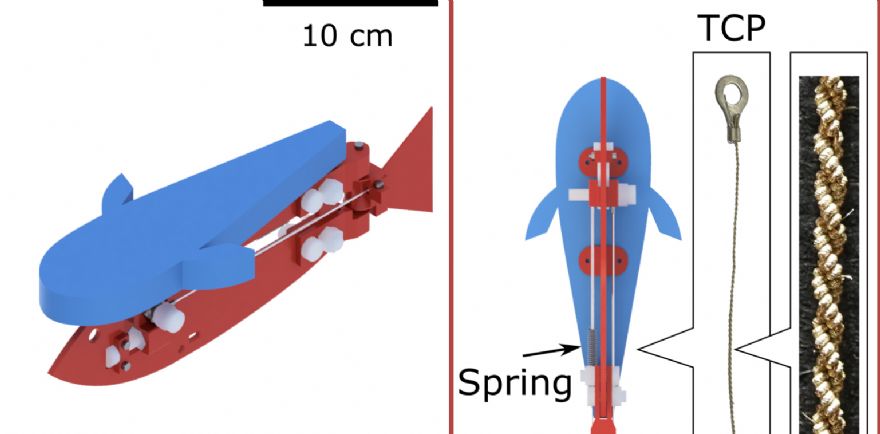
Twisted and coiled polymer (TCP) is a potential new actuator, displaying appealing qualities of lightweight, cheap cost, high energy density, plus a simple fabrication technique, according to lead scientist Tsam Lung You from Bristol’s Department of Engineering Mathematics. They may be created using materials that are extremely accessible, like fishing lines, and when heated, they shrink and offer linear actuation. However, this makes them sluggish since it takes time for heat to dissipate during the rest period.
It made it possible for the posterior fin to swing at a greater angle with the same amount of TCP actuation by improving the structural architecture of the TCP-spring antagonistic muscle pair and moving their anchor points closer together. TCP is a powerful actuator with a high work energy density, thus even if more force is needed, it can still drive the fin.
TCPs have primarily been utilised up till now for wearable technology and robotic hands. This development expands the potential uses of TCP, including the employment of marine robots in underwater monitoring and exploration. Tim Lung Additionally, you stated that “our robotic fish swam at the quickest actuation frequency found in a real TCP application as well as the highest locomotion speed of a TCP programme so far.”
The team now intends to increase the size and create a ribbon fin robot with a TCP drive that can swim swiftly in water.
For more such updates, keep reading techinnews
